













Making Agriculture Sustainable by Introducing Robotics Technology Why DENSO is committed to the agritech business
On December 2, 2020, DENSO Tech Links Tokyo #9, an event organized by DENSO Corporation, was held as a webinar. The theme was “Challenging the Development of Human Support Robots.” Ayako Iwai of the Food Value Chain Business Development Div. gave a presentation on robotics technology that supports agriculture.
【Speaker】
Ayako Iwai
Project Manager, FVC Business Strategy Dept, Food Value Chain Business Development Div., DENSO Corporation
Inspired by Robot Anime Shows
Ayako Iwai: Today, I will talk about the application of industrial robots in new business fields, agriculture in particular.
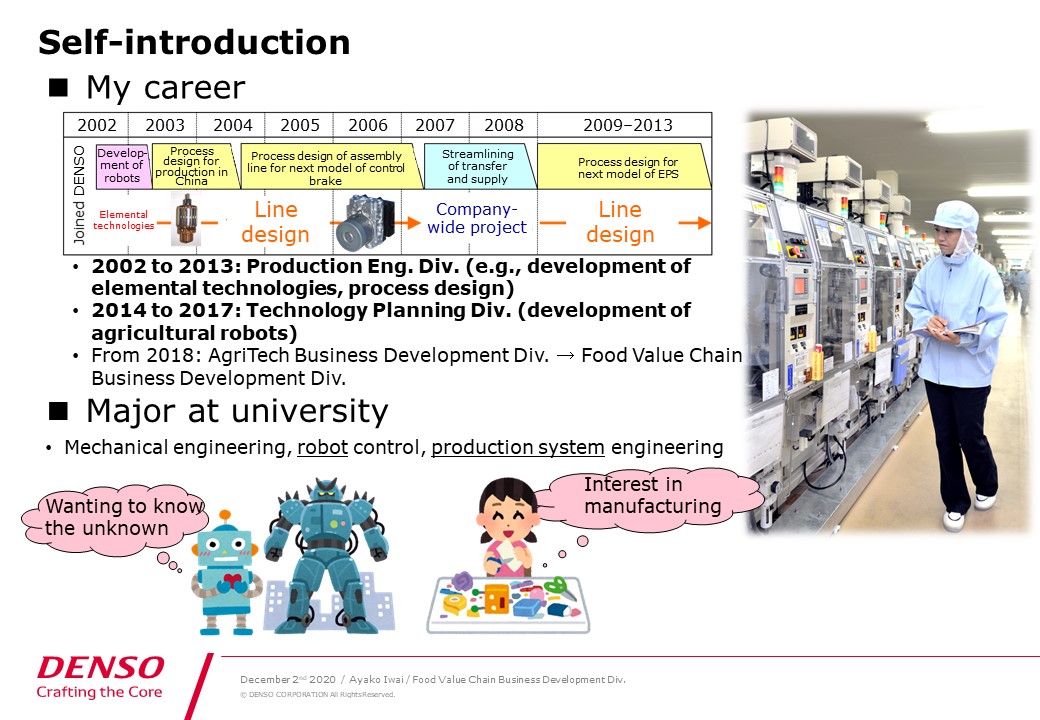
I majored in mechanical engineering at university, and studied robot control and production system engineering.
As a child, I watched robot anime shows and wanted to know the unknown through these robots. I was really interested in manufacturing, so I decided to major in mechanical engineering.
Honestly, if you were to ask me whether I’m interested in vehicles, I would have to admit that I’m not (laughter). I joined DENSO in 2002 because I was interested in manufacturing. I was in charge of designing our production lines at factories as a production engineer.
I was in charge of robots from the start of my career, so I designed production lines based on my experience in developing elemental technologies for robots until 2013. In 2014, I started to work on developing robots for supporting agriculture in the Technology Planning Div. Today, I will mainly talk about this part of my career.
In 2018, I was transferred to the Agritech Business Development Div., which specializes in agriculture. The division was later renamed the Food Value Chain Business Development Div., and that’s where I currently work.
History of DENSO’s Industrial Robots
DENSO manufactures automotive components. I will talk about industrial robots, which are manufactured by DENSO WAVE. DENSO WAVE develops and manufactures automatic recognition systems, which are used for manufacturing automotive components and industrial robots.
This slide shows the history of DENSO’s industrial robots. DENSO started developing robots in 1967, initially for in-house manufacturing. DENSO WAVE was established in 2001.
Later, DENSO WAVE started to develop and sell 5- and 6-axis robots, 4-axis (SCARA) robots, other industrial robots, as well as robot controllers, the ORiN platform, medical robots, and collaborative robots.
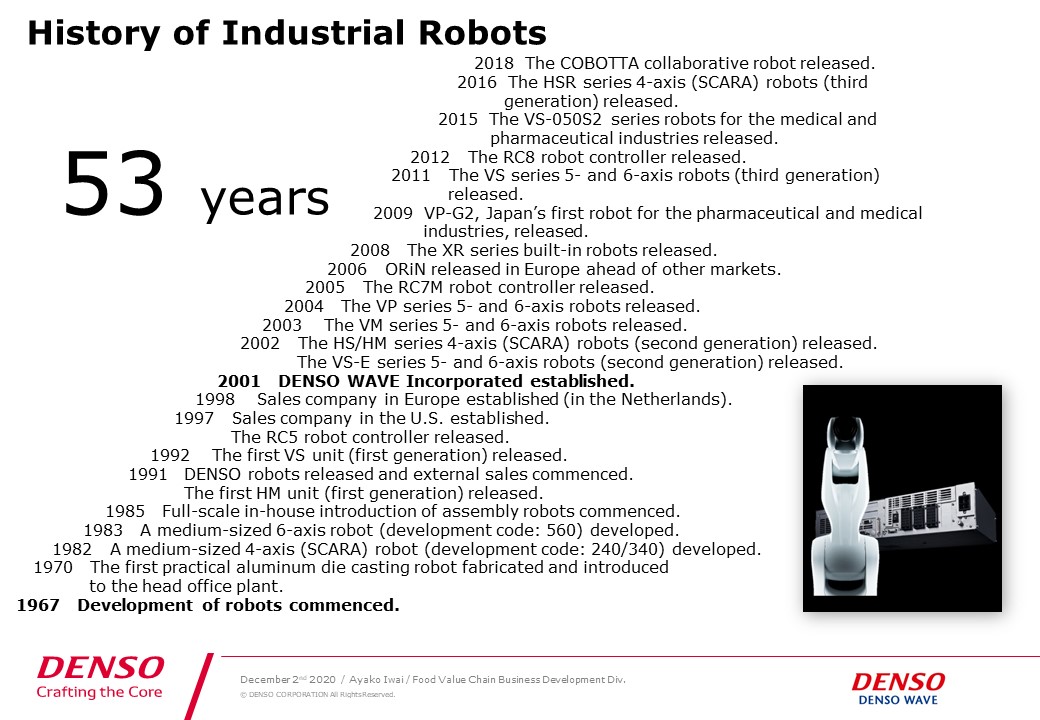
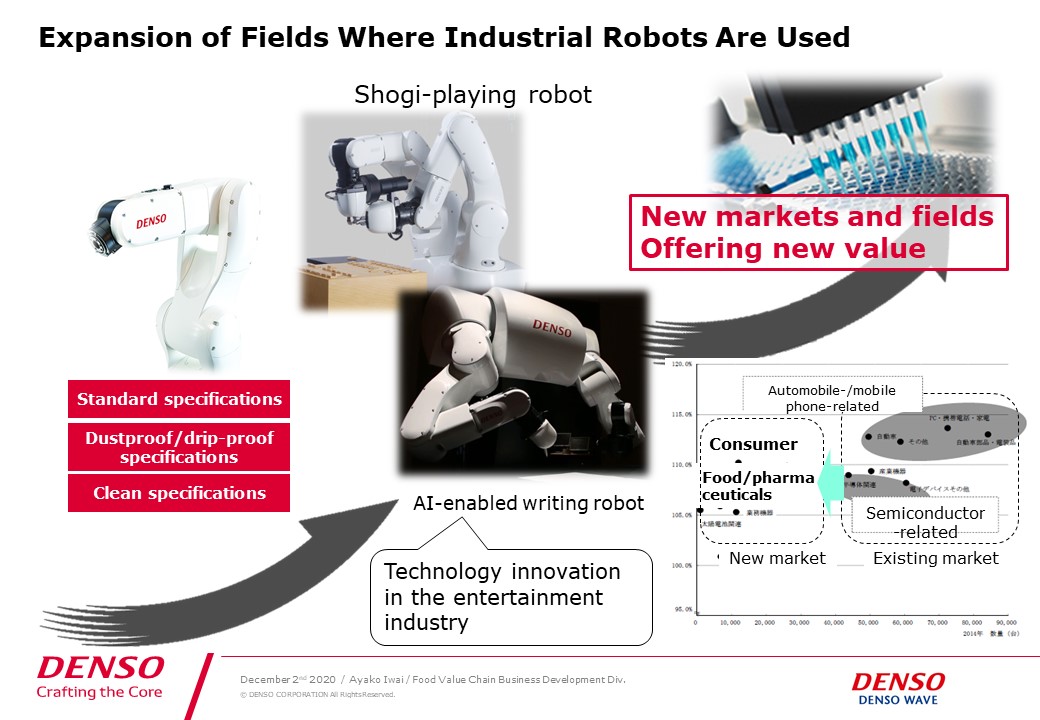
First, industrial robots with standard specifications were developed. Then, robots with dustproof, drip-proof, and clean specifications were developed so they could be used in various fields.
However, the potential for market expansion was limited, so technology innovation focused on the entertainment industry, such as a shogi-playing robot and an AI writing robot, which were featured in TV programs. We are working on projects to create new value in new markets close to consumers, such as food and pharmaceuticals, based on our existing markets.
Bin Picking AI Robots
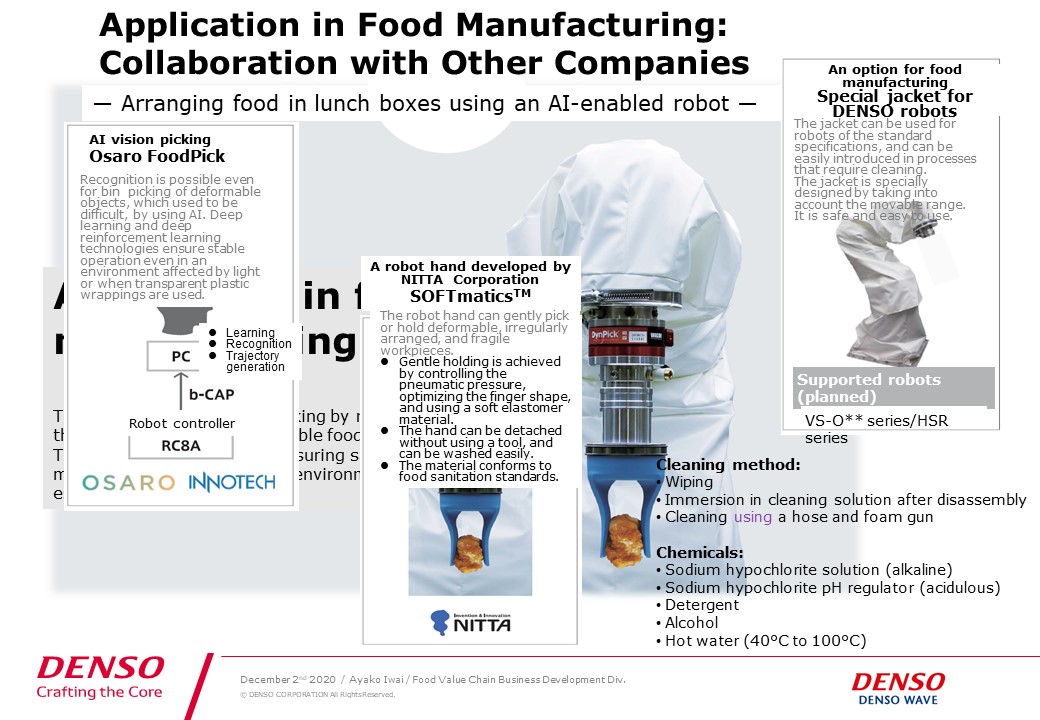
Let me introduce two examples. One is in food manufacturing. The systems were built by combining our industrial robots with products of other manufacturers.
In a process in which food is arranged in lunch boxes using an AI robot, bin picking is performed by AI first. Bin picking is the process of recognizing randomly located pieces of deep-fried food and looking where to hold them.
This hand can gently hold deformable and soft food, such as these food samples. Ordinary robots cannot be used in food manufacturing factories, so they are covered with this jacket to enable them to be used in a clean environment.
This video shows a demonstration at a robot exhibition in 2017. The system recognized deep-fried food, which was piled on a tray, based on an image from the top. The hand held the food and placed it on lunch boxes on the conveyor. The demonstration showed that the same hand was capable of holding small items, such as pickled plums, as well as soy sauce bottles.
The system helps the food industry cope with a shortage of workers needed to pack food in lunch boxes.
COBOTTA Collaborative Robot
The COBOTTA collaborative robot was developed under the concept of “Anywhere, anytime, hassle-free. A robot that collaborates with everyone.” It is a tiny robot that works in an area the size of a sheet of A4 paper.
The concept of COBOTTA is to be safe, both in shape and motion. The robot is designed to prevent hands from being trapped when people are working close to the robot. It is compact and therefore easy to install in workplaces where help is needed.
The direct teaching function enables the user to teach the robot about the presence of an object and where to hold the object by holding the tip of the hand.
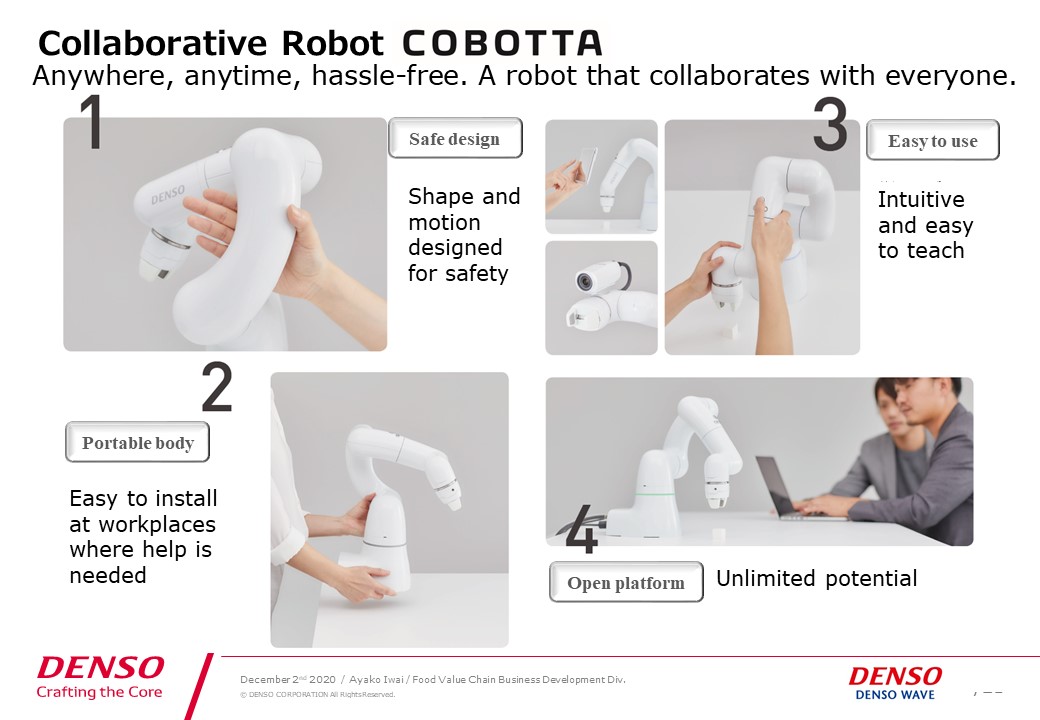
The robot is not only easy to control, but can also perform complicated tasks. An open platform enables different users to use its full potential.
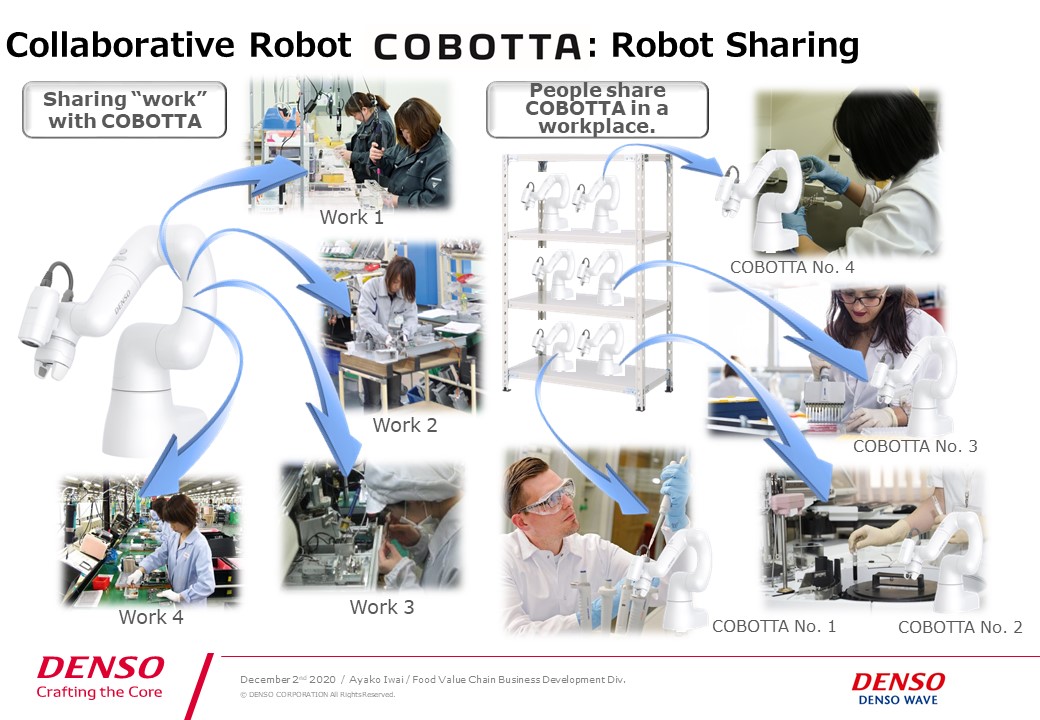
We propose robot sharing. For example, a COBOTTA robot could be used to share various tasks, such as assembly and inspection processes.
COBOTTA robots can also be shared by multiple people in the workplace, and can be chosen randomly. For example, COBOTTA No. 1 could be used for experiments, and COBOTTA No. 2, 3, and 4 could be used for other inspection processes. Such sharing helps expand the scope of application.
Why Did We Choose Agriculture as a New Business Field?
Next, I’d like to explain why we decided to focus on agricultural support and infrastructure inspection as new business fields for robot technologies.
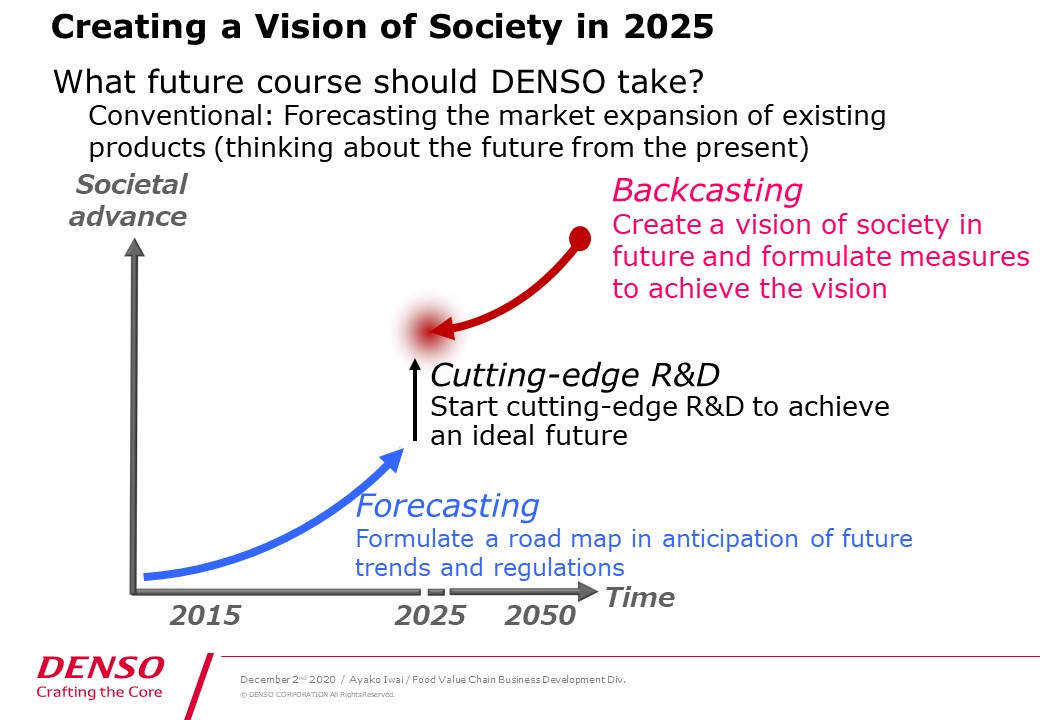
Previously, a vision of society in 2025 was created in-house. We then forecasted the market expansion of existing products to decide which direction DENSO should take. However, we can only forecast the future 7 or 8 years ahead, so we could not define the future goal.
We decided to use the backcasting technique, which we used to create a vision of society and then plan prototype production to achieve that vision. This technique helped plan cutting-edge R&D to fill the gap. We asked overseas group companies to assist these activities.
We gathered various opinions from group companies, and asked them to create a vision of society in future and identify possible challenges and solutions.
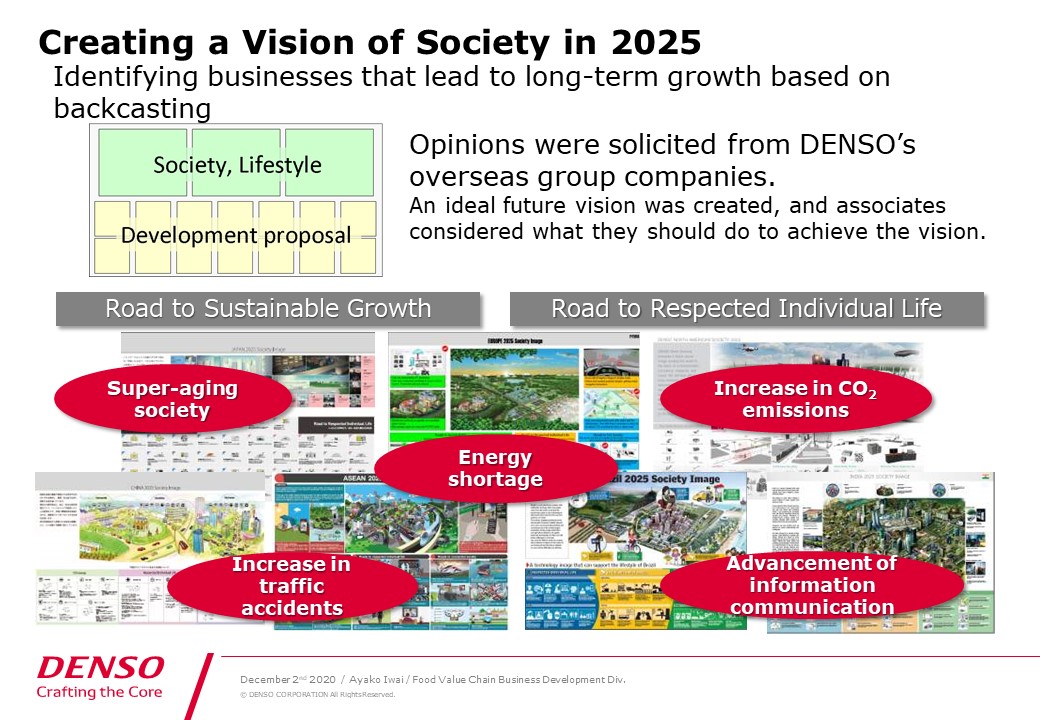
The identified challenges included, as expected, an aging society, energy shortages, and more traffic accidents. Three main measures were proposed to solve these challenges.
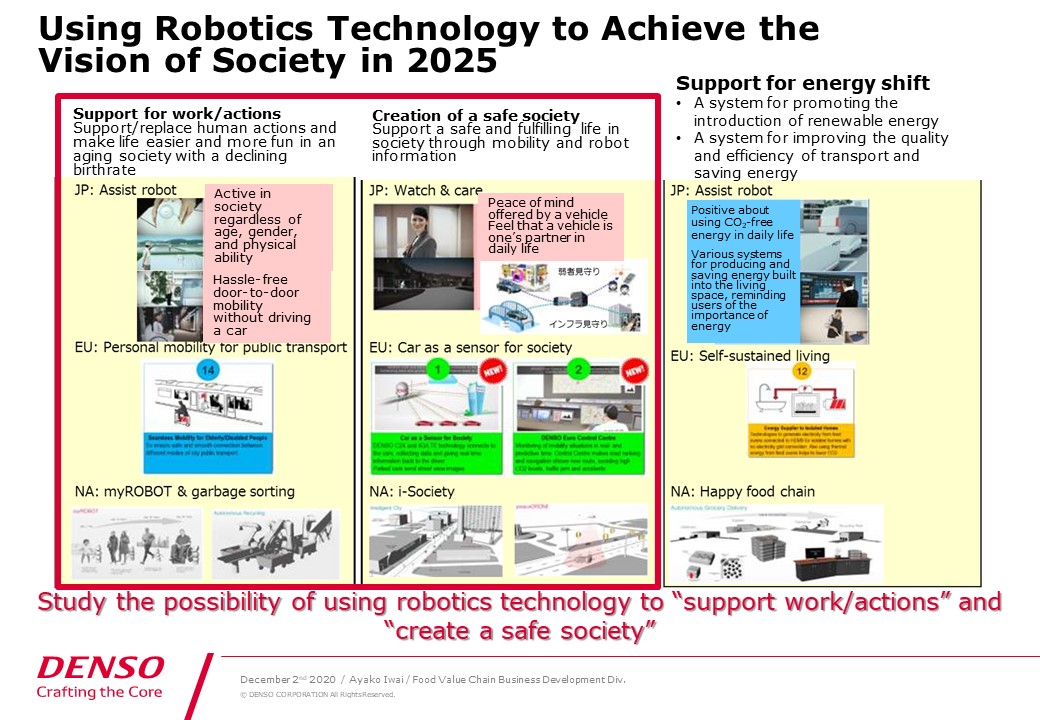
These measures were “support for work/actions,” “creation of a safe society,” and “support for energy shift.” We considered possible applications of the robotics technology that we wanted to develop. We started to study “support for work/actions” and “creation of a safe society.”
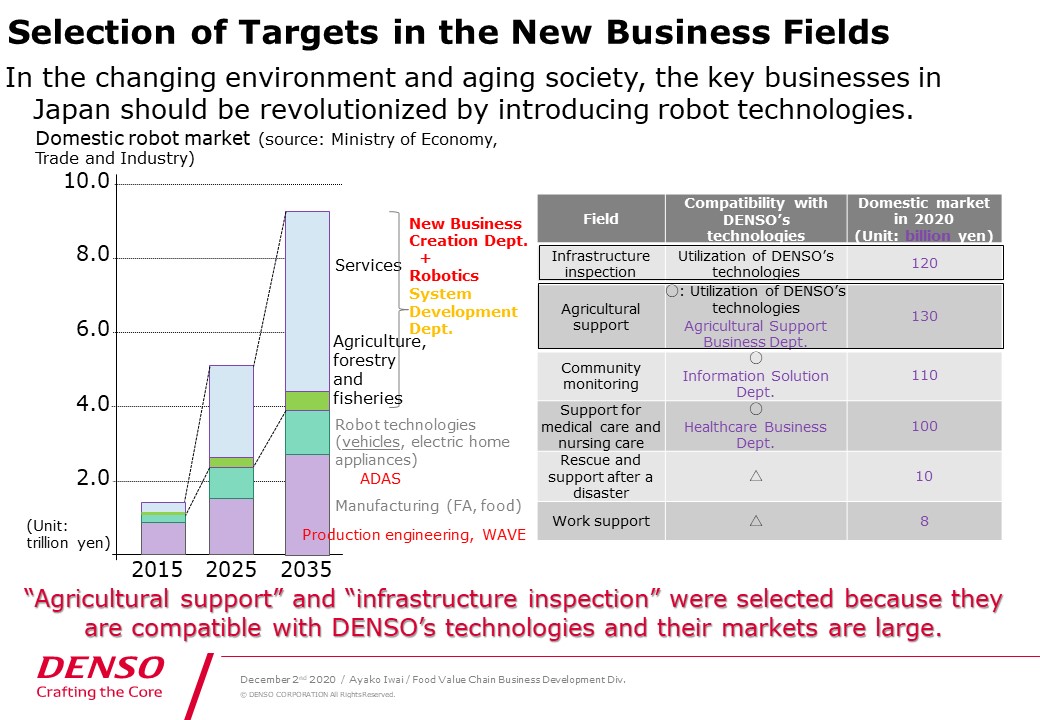
Then, we considered how to overcome Japan’s challenges by using robot technologies in the changing environment and aging society. We selected agricultural support and infrastructure inspection, which have the largest markets, taking into account both the future trend of the robot market and compatibility with new business fields.
Use of Robotics for Agricultural Support
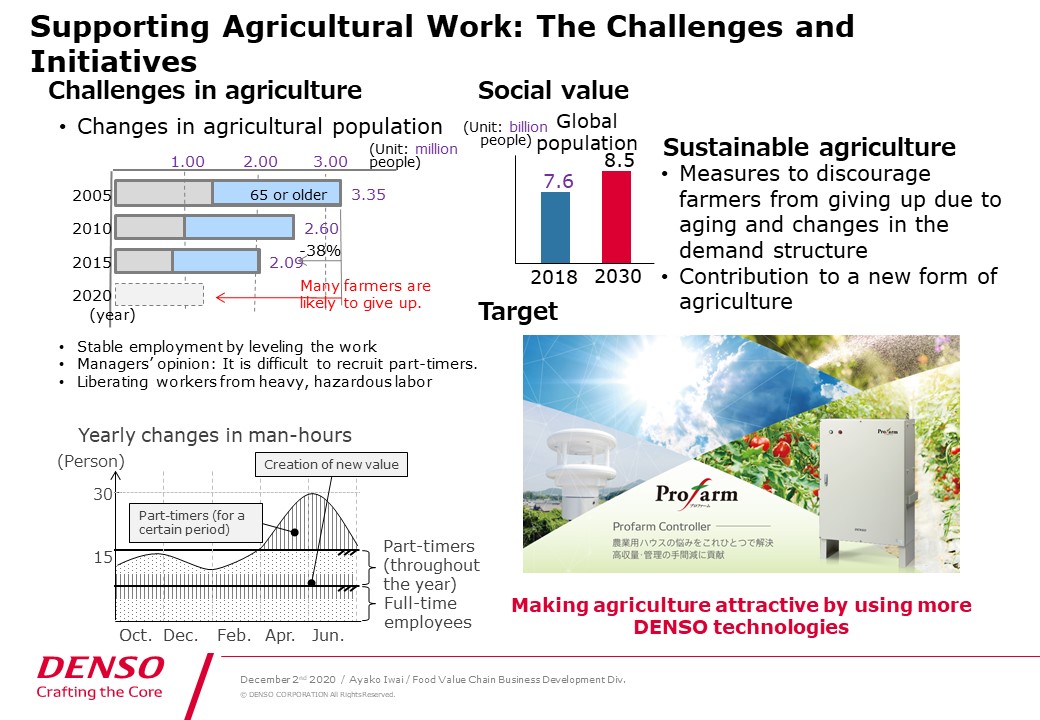
Before looking at how robotics can be used to assist agriculture, let’s take a look at the challenges faced by agriculture in Japan. This graph shows the changes in agricultural population. The percentage of old farmers is very high, and many farmers are likely to give up every year.
To avoid this situation, young people need to take up farming. Managers told us that the workload changes greatly each month, making it difficult to provide stable employment and recruit part-timers.
For example, when a supermarket opens up in a community, it pays high wages and employs all part-timers available. We considered the possibility of solving the labor shortage, which requires employing part-timers, by creating new value.
We also looked at ways to free workers from heavy, hazardous labor, including working at heights, which are unavoidable in agriculture.
The global population is still growing and is expected to lead to food shortages. We wanted to develop technologies to make agriculture sustainable.
We analyzed the scope in which we could contribute to agriculture. We decided to support agriculture by using in-vehicle air-conditioning control technology. We had already developed and released the Profarm Controller to control the environment of indoor cultivation, as shown on this slide. We considered how to make agriculture more attractive by using robot technology extensively in indoor cultivation.
How Did We Develop Agricultural Support Robots?
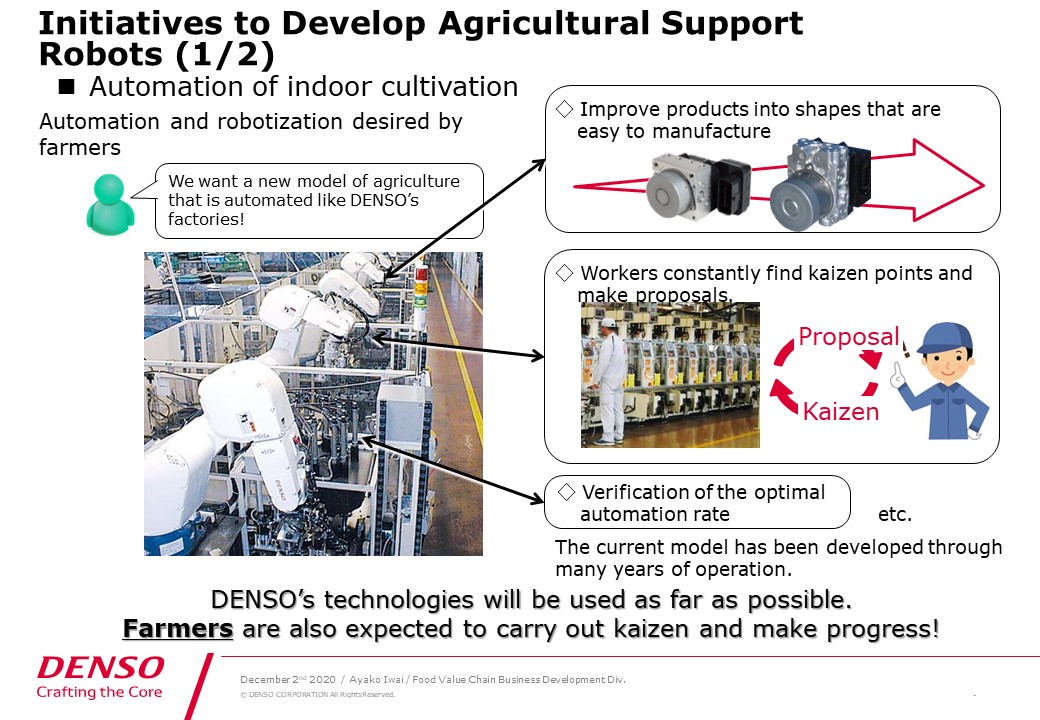
In terms of automating indoor cultivation and greenhouse cultivation, we asked farmers about the type of automation and robots they wanted. When we showed our manufacturing sites, they said things like, “We want a new model of automated agriculture like DENSO’s factories!” However, it was not easy to develop such manufacturing sites, and we conducted much trial and error.
To automate things, it is necessary to arrange products with shapes that are easy to assemble and manufacture. On-site workers improve manufacturing sites by repeatedly carrying out kaizen and making proposals.
It may not be most effective to introduce many robots for automation. An optimal return on investment must be taken into account, and so it is necessary to assess the level of automation required.
Our factories have been improved over many years. We hope to apply the technologies we have developed to agriculture wherever possible.
Nevertheless, automation is about more than simply using technology. It is also necessary to help farmers understand and cooperate.
Automation of Agriculture
Let me explain how we carried out automation.
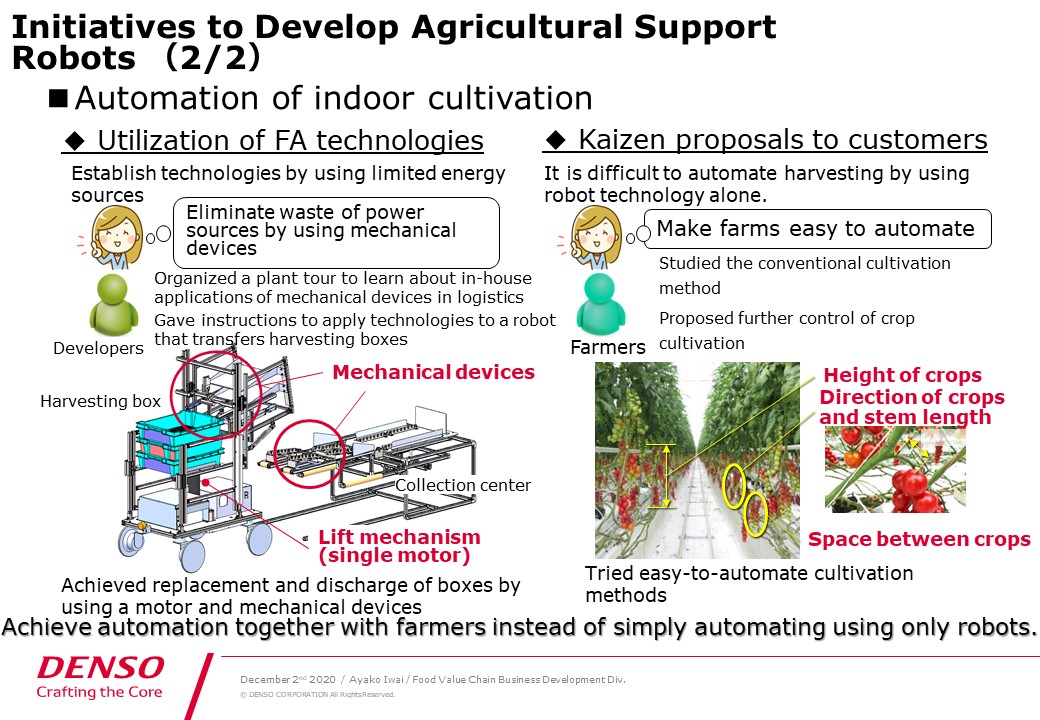
We used factory automation technologies. The energy available on farms is limited compared to factories, so we focused on developing mechanical devices that work efficiently with minimal energy consumption and eliminating wasted power.
This slide shows one example. After observing in-house logistics systems using mechanical devices, a new mechanical device for replacing boxes was created using a single motor.
It was difficult to automate the entire harvesting process by using robot technology alone. We suggested to our customer that cherry tomatoes, which were our first project, be made easy to harvest. We worked with Asai Nursery, which is a large-scale tomato grower in Mie Prefecture, to improve the cultivation environment and management method.
For example, making the harvesting height the same makes it easy for robots and farmers to harvest crops.
Tomatoes grow on vines in various directions. By understanding the characteristics of the plant and encouraging tomatoes to grow in the same direction, it becomes easier to harvest them.
We conducted tests with farmers to manage the cultivation environment. For example, the space between crops was made constant to simplify harvesting. We aimed to achieve automation together with farmers instead of simply automating using only robots.
Status of Development of Harvesting Robots
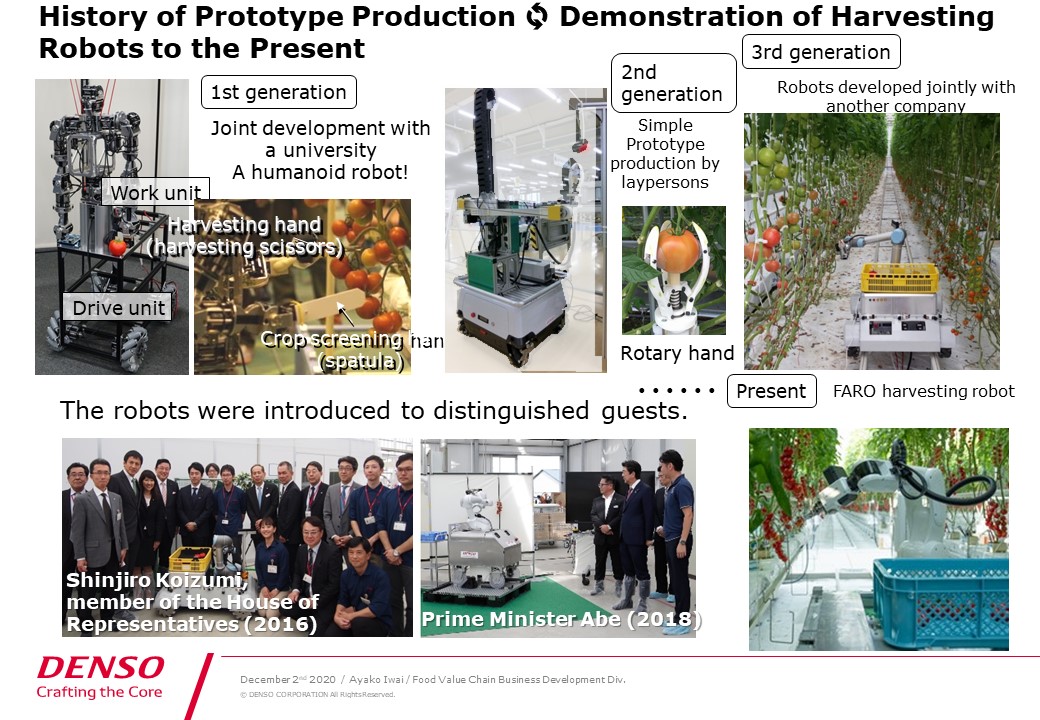
Next, I’ll explain the history of prototype production and demonstration of harvesting robots up to the present day. We started to develop robots in 2014. At first, we conducted joint research and development with a university, and developed a dual-arm robot to harvest tomatoes with both hands.
This robot was difficult to control because it had too many joints. A group of ordinary people was brought into the project to develop a simple robot. Prototypes were developed to try harvesting.
Demonstrations were conducted with Asai Nursery using a system incorporating a collaborative robot.
These efforts helped build personal networks, and we got the chance to introduce the robots to distinguished guests. Eventually, we developed the FARO harvesting robot.
FARO Harvesting Robot
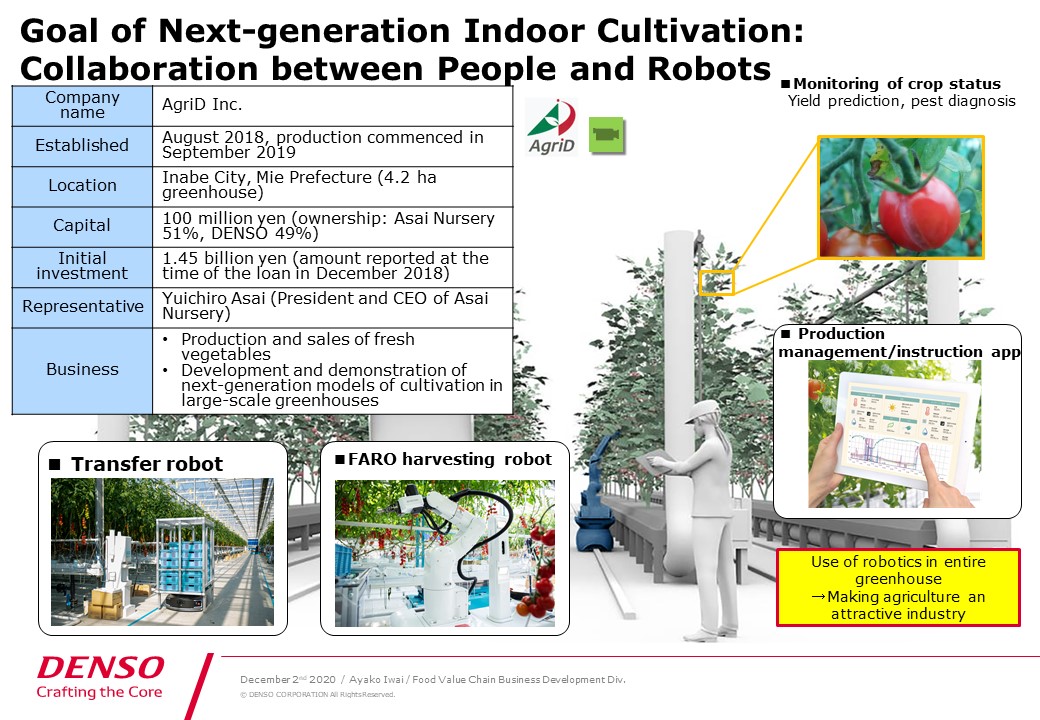
AgriD Inc. was established in Mie Prefecture in 2018. Demonstration experiments have been conducted using the FARO robot in a 4.2-hectare greenhouse, which started production in June 2019. Let’s watch a video.
At AgriD, demonstrations are conducted to automate the work. Transfer robots and FARO harvesting robots are also used in the demonstrations. We will build up a track record before selling these robots.
It is also necessary to automate management to raise the production efficiency of an entire farm. At present, cameras are used to monitor the crop status. A project is underway to predict yield and diagnose pests to identify potentially affected areas.
Besides, we are building and testing a system for managing production workers and giving them instructions so that even beginners can get involved in farming.
The ultimate goal of next-generation indoor cultivation is not just to collaborate between people and robots. We want to make agriculture an attractive industry by using robotics technology in all greenhouses and encourage young people to join.
Thank you very much.
